Goal:
- Learn how to use the distance sensor.
- Learn about the Wait-Until block.
- Learn about the Forever block
- Learn how to change the speed of car while it is moving
Concepts:
- Sensor limits.
- Sensor field-of-view.
- Program logic: If-Then, Until, While, Repeat-Forever
- Conditions
Materials:
Two-wheel drive car used in last lesson.
Preparation:
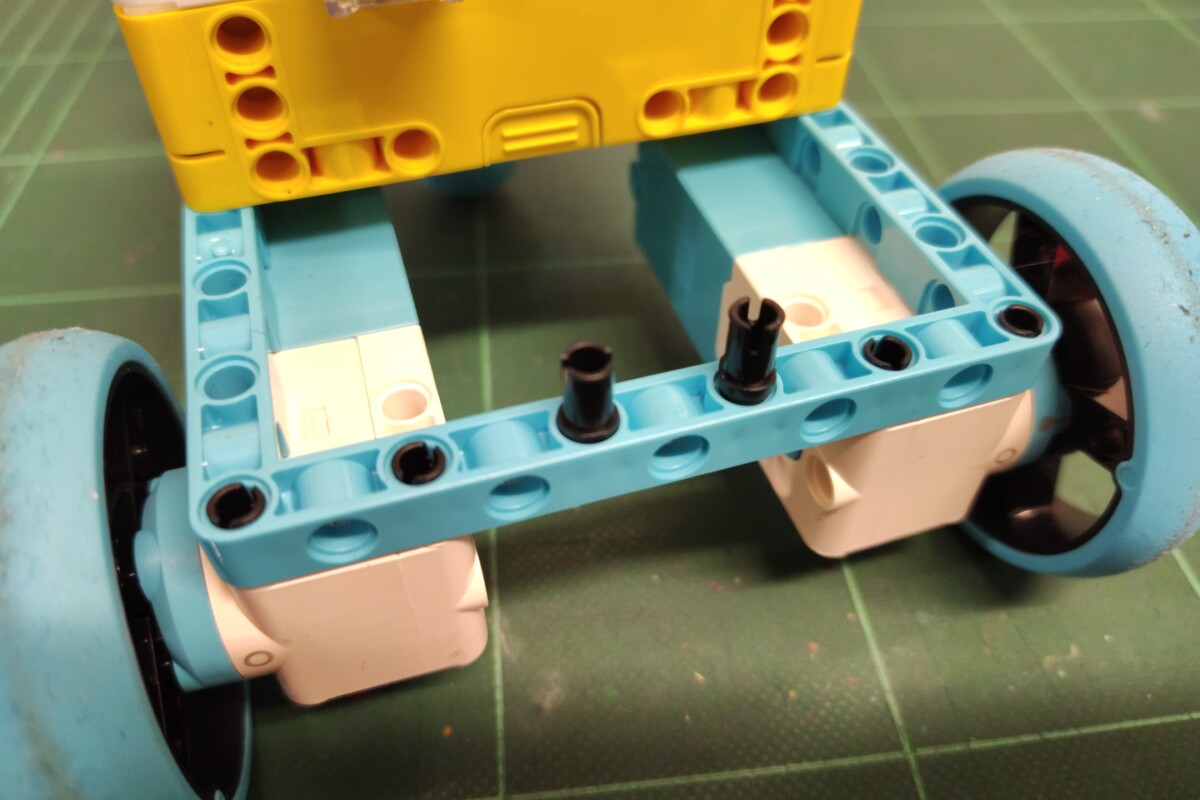
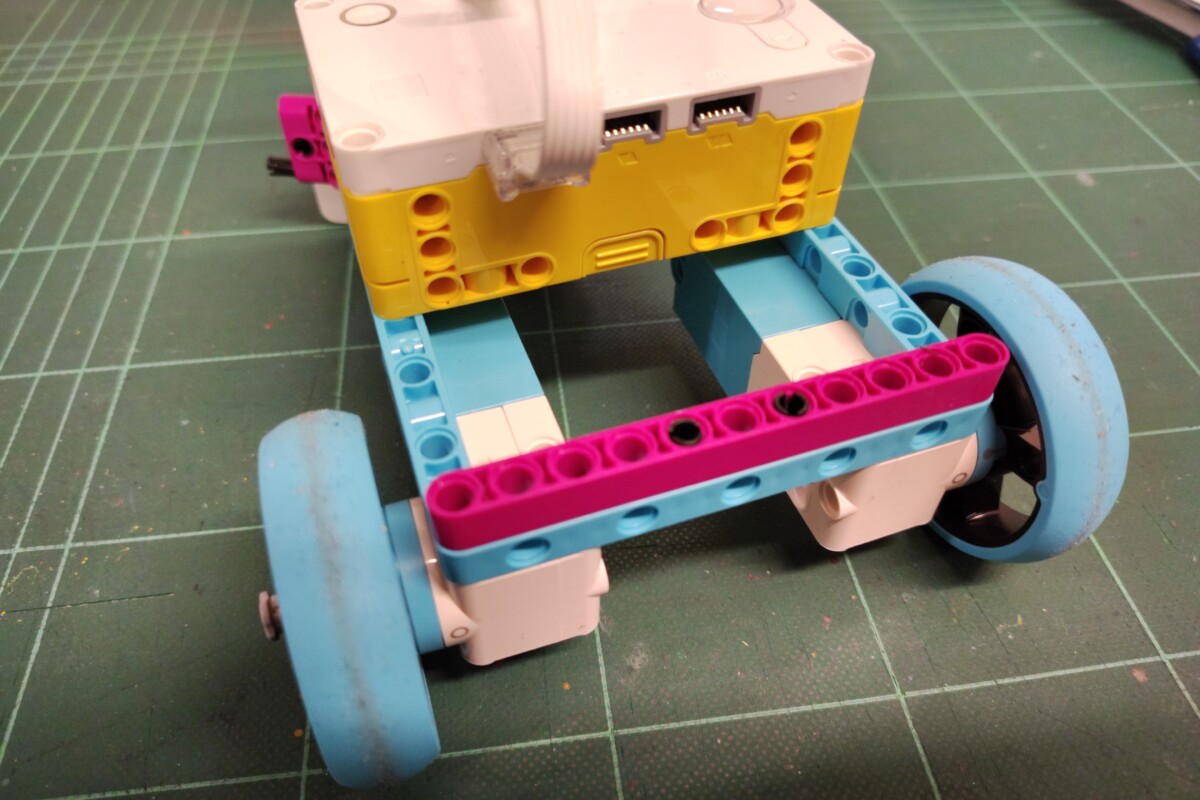
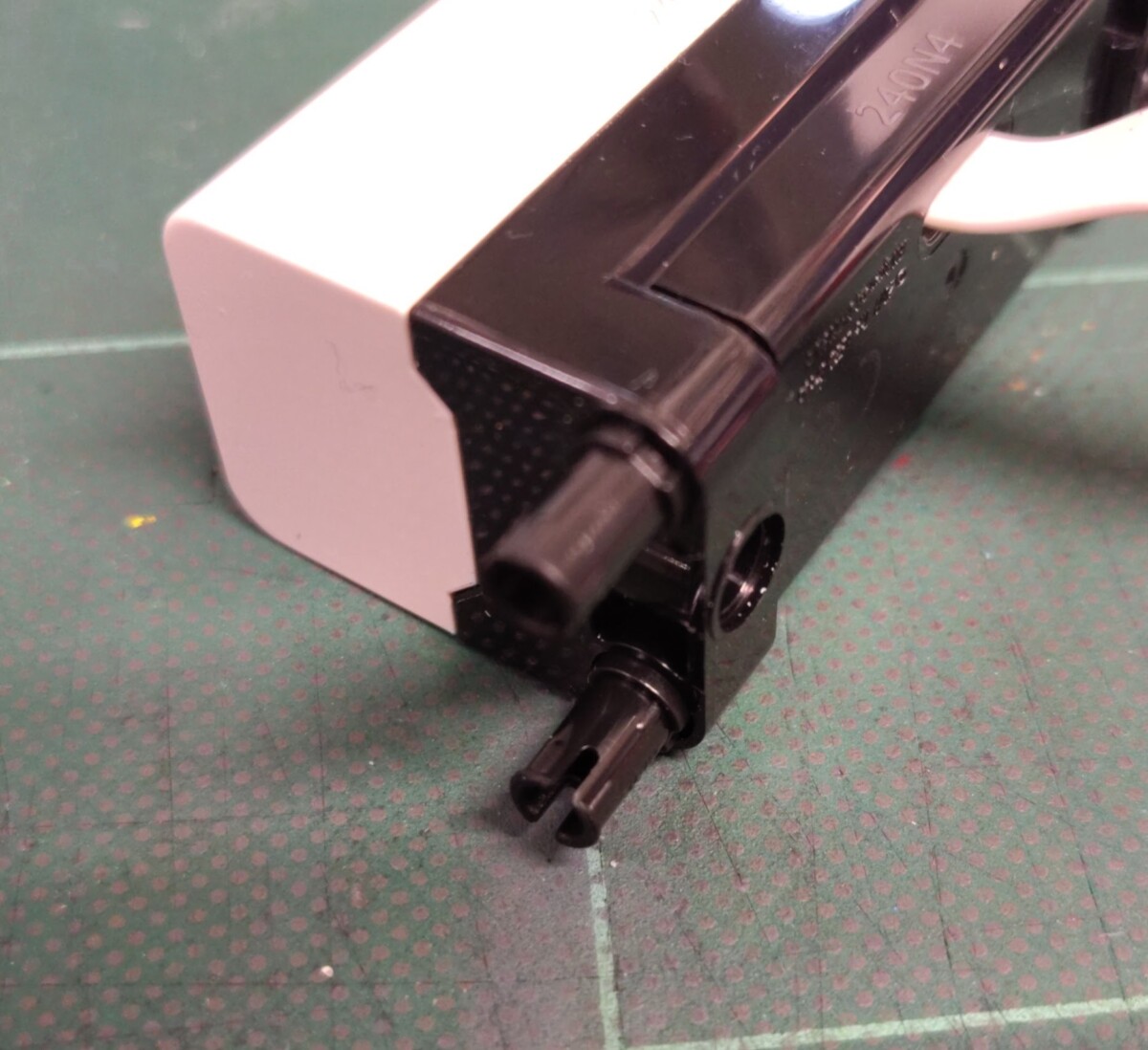
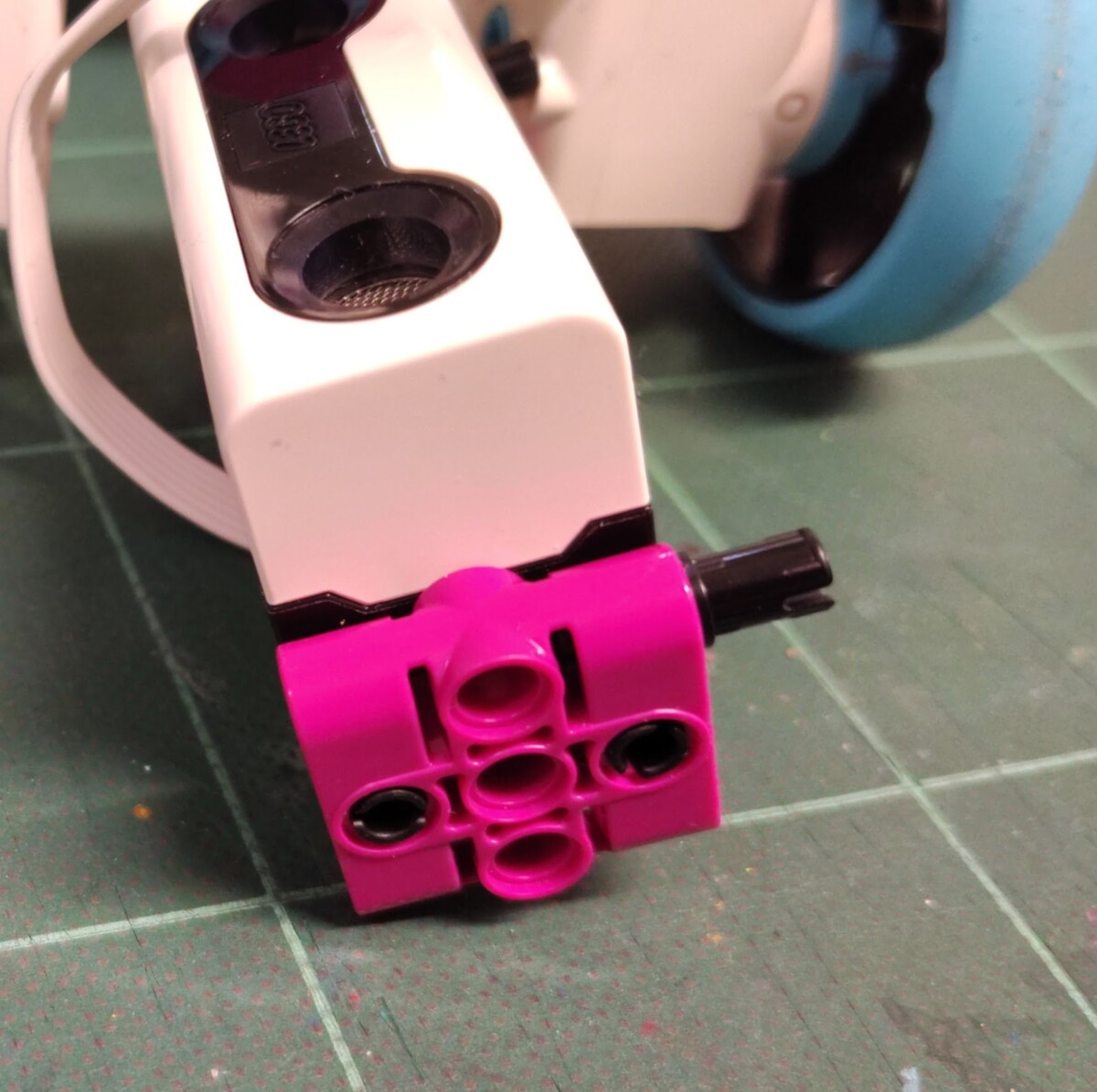
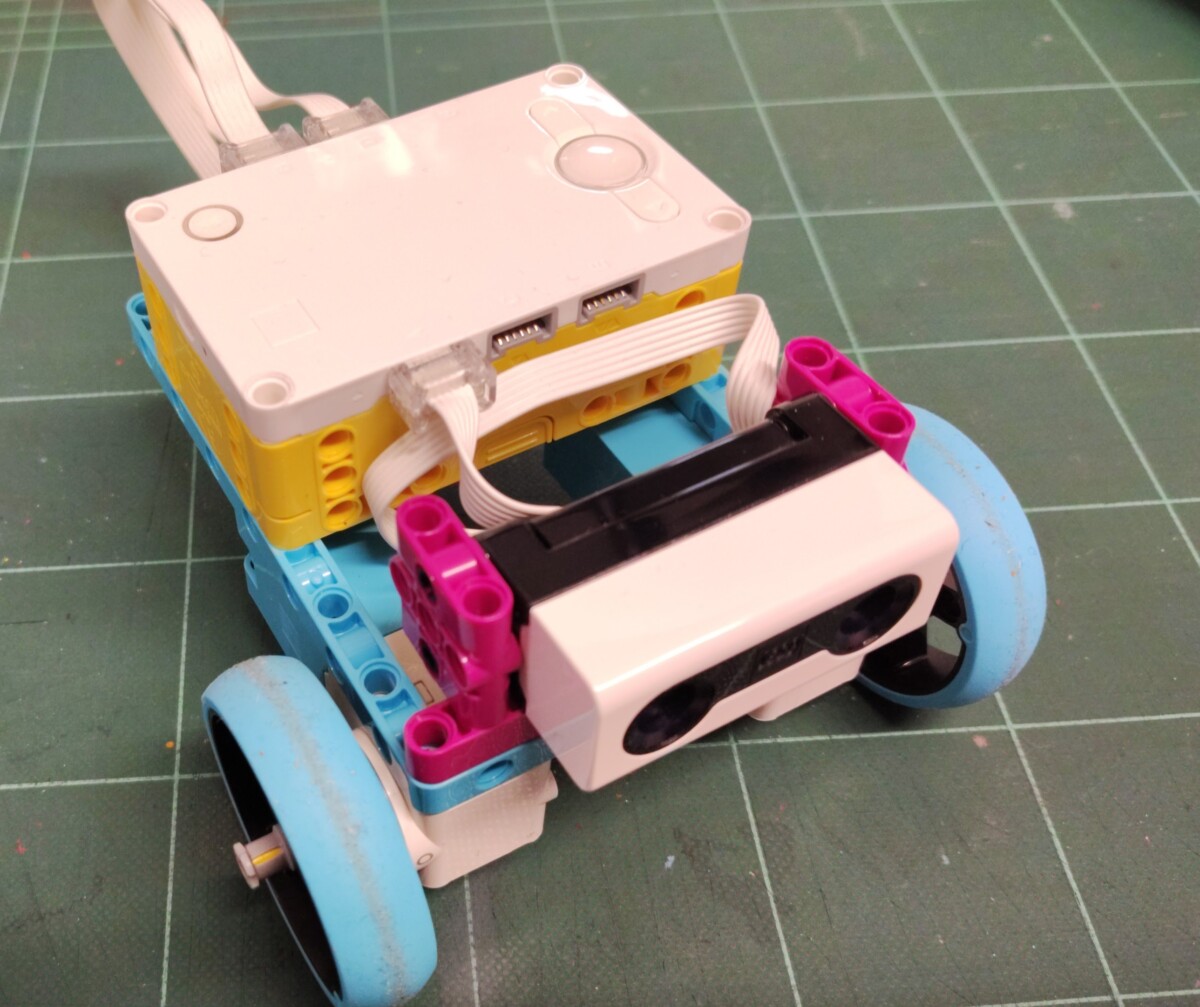
Add the distance sensor to the car by following this construction method:
Procedure:
- Program the car to stop when it approaches an object.
- Program the car to slow down as it approaches an object before it finally stops.
- Program the car to reverse and change direction when it encounters an object.
Homework:
Let the robot “explore” different spaces in your house. You may want to change the amount of back-up and turning.